


Grassland's peer-to-peer computer vision software lets developers give their software an API for accessing real life environments regardless of economic, geographic or political barriers.
And it lets 3rd-party applications and AI agents query, locate, and respond immediately to physical changes in tangible assets.
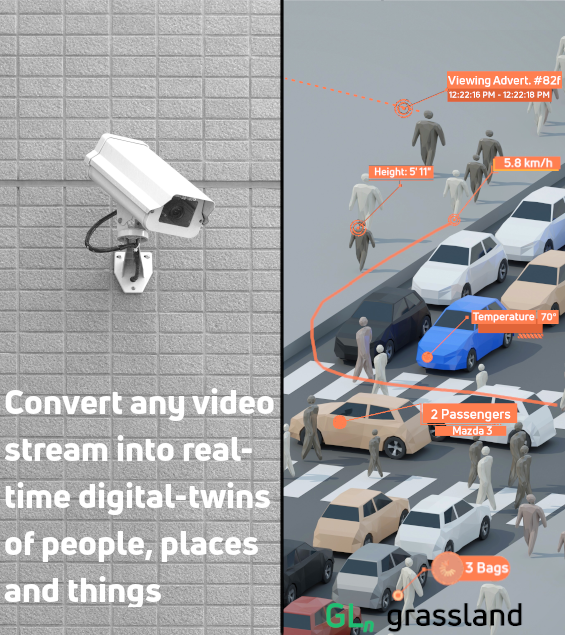
Grassland's open-source client turns live camera feeds into a real-time, searchable digital twin of the physical world. It shares anonymized detections and tracks rather than raw video.
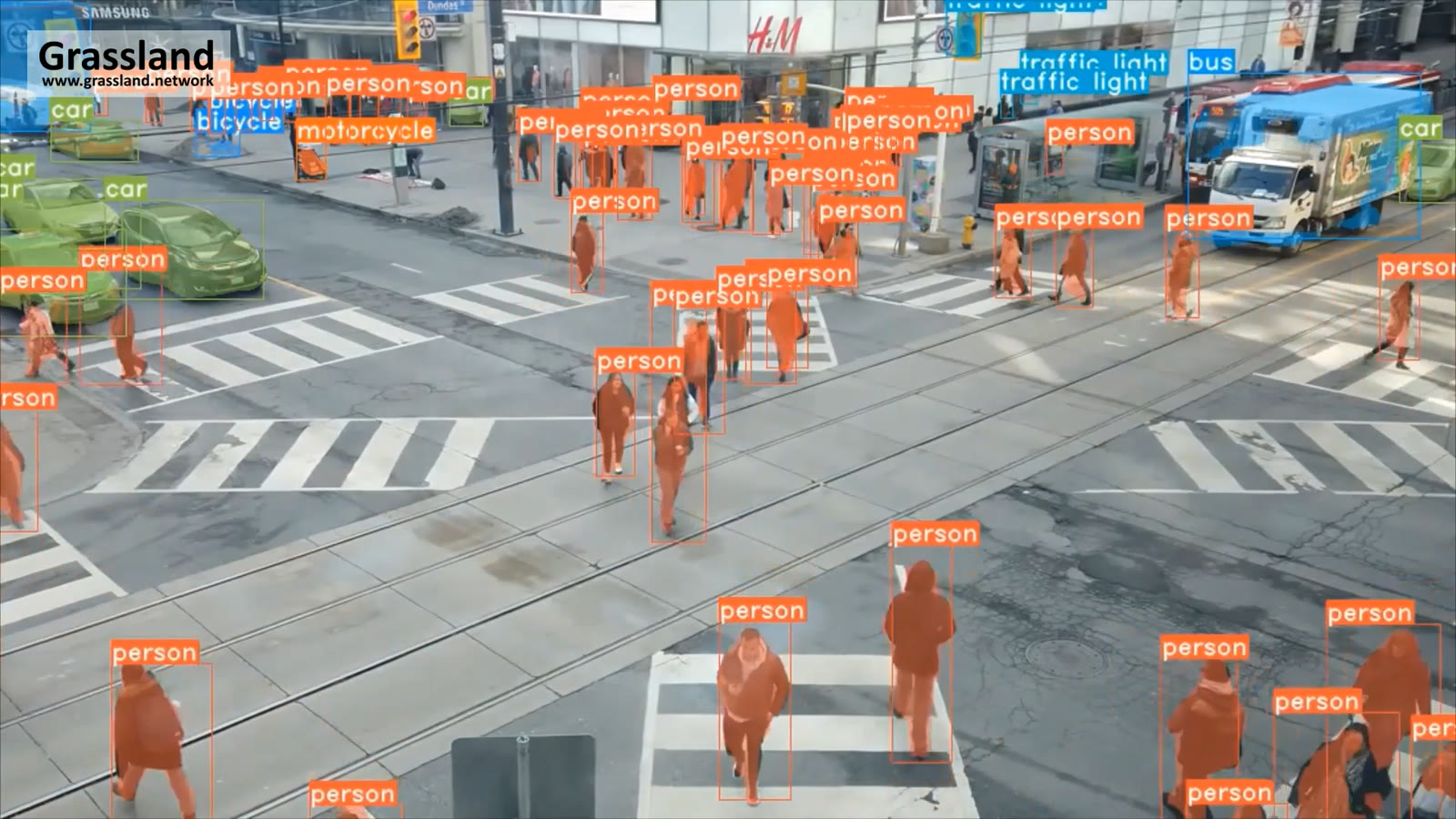
A live digital twin of a city intersection, showing anonymized detections rather than identities.
From warehouses to traffic intersections, Grassland reveals how environmental cues affect human decision making.
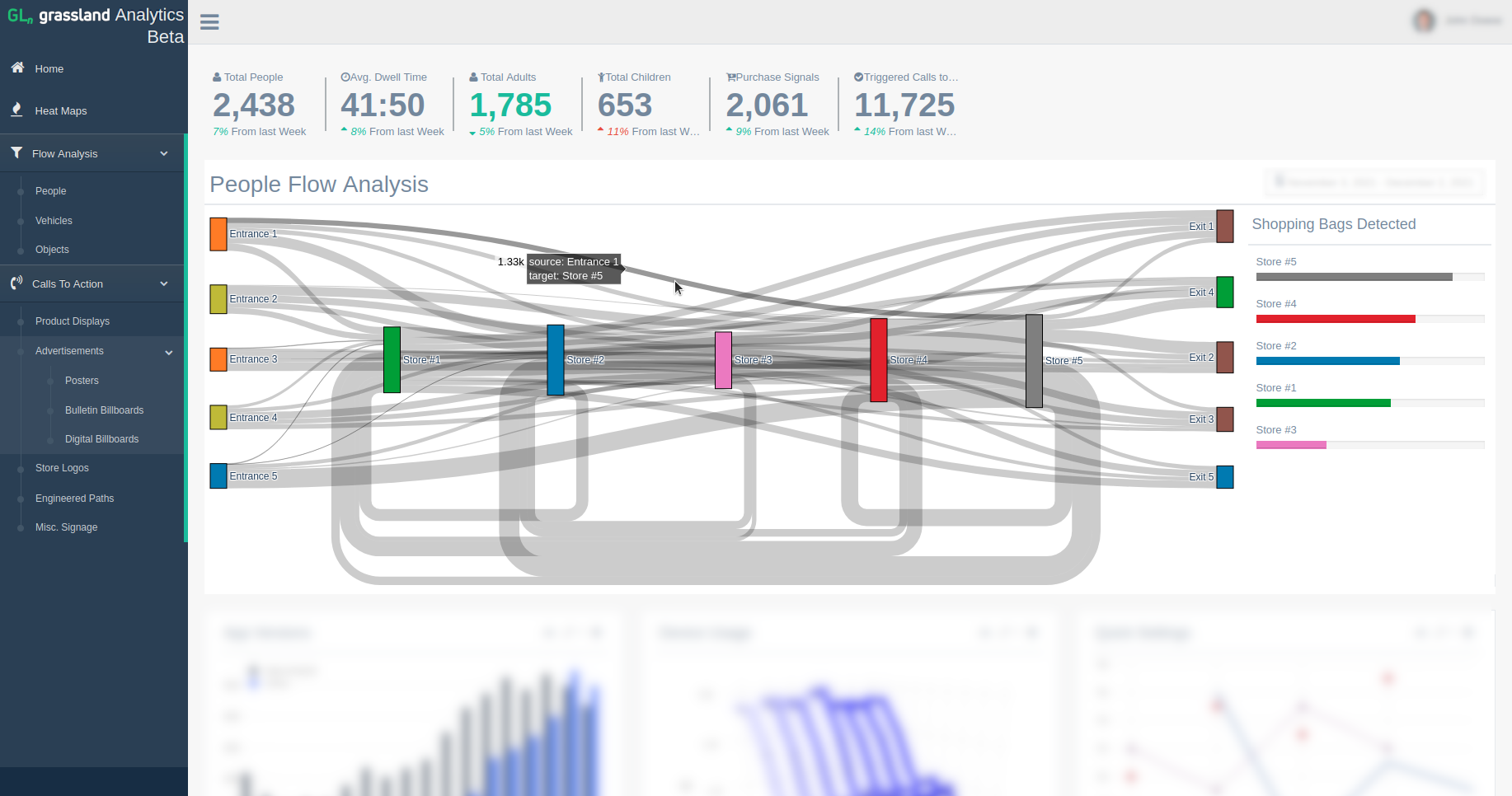
Apps like 'Analytics Beta' (pictured here) help retailers unlock new revenue with clear insights into the customer journey and conversions.
The software client's queryable API provides information on the location, custody and transfer of all tangible assets across the map.
This searchable digital history of assets and their environments is stored securely in Grassland's geospatial record.
Every camera an operator brings online extends the network's live map of the physical world.
The network's coverage grows as more cameras come online.
From old cell phones and traffic cams to state of the art satellite feeds, the software is compatible with most digital video stream formats.
It'll always work the way it's supposed to whether or not the participants (individuals, companies, governments, etc.) trust or even know each other.





Grassland gains more intelligence from exposure to volatility and attacks than from anything else. Which allows your protocols to not just survive conditions that would destabilize other organizations but to thrive in them.
This helps the network adapt and improve its coverage of a building, street, neighbourhood, or city over time.
Grassland's distributed design makes it resilient and self-improving as real-world conditions change.